Image Details
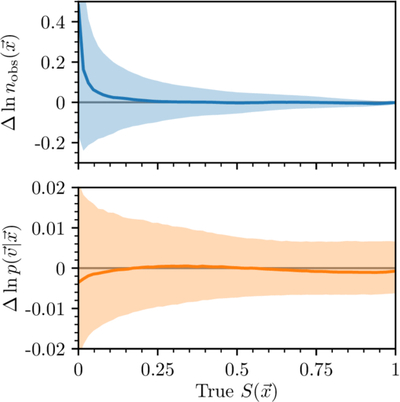
Caption: Figure 5.
Top panel: residuals between our normalizing flow model of the distribution of observed kinematic tracers and the ground truth—﹩{\rm{\Delta }}\mathrm{ln}{n}_{{\rm{obs}}}\left({\boldsymbol{x}}\right)\equiv \mathrm{ln}{n}_{{\rm{obs}}}\left({\boldsymbol{x}}\right)-\mathrm{ln}\left[n\left({\boldsymbol{x}}\right)S\left({\boldsymbol{x}}\right)\right]﹩, where ﹩n\left({\boldsymbol{x}}\right)﹩ and ﹩S\left({\boldsymbol{x}}\right)﹩ are the true spatial density of the tracers (including those that are not observed) and selection function, respectively. Bottom panel: residuals between our conditional normalizing flow model of the velocity distribution and the ground truth. The conditional distribution ﹩p\left({\boldsymbol{v}}| {\boldsymbol{x}}\right)﹩ is recovered to within ∼2%, even for ﹩S\left({\boldsymbol{x}}\right)﹩ as low as ∼0.01. Due to the complex nature of the spatial selection function, the fractional errors in the recovered ﹩{n}_{{\rm{obs}}}\left({\boldsymbol{x}}\right)﹩ are larger, and the median residual diverges substantially from zero at low ﹩S\left({\boldsymbol{x}}\right)﹩.
Other Images in This Article



Copyright and Terms & Conditions
© 2026. The Author(s). Published by the American Astronomical Society.