Image Details
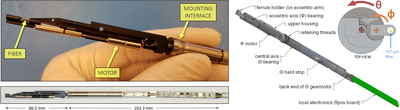
Caption: Figure 3.
The DESI fiber positioner robot is designed for a minimum 10.4 mm pitch between neighboring units. It has two rotational axes, driven by independent ø 4 mm 337:1 gearmotors. Drive electronics are integrated into a board mounted to the aft end. The assembly consists of 22 parts and 10 fasteners. The design was developed at LBNL and SSL, and mass-produced by UM and EPFL.
Other Images in This Article







Show More
Copyright and Terms & Conditions
© 2022. The Author(s). Published by the American Astronomical Society.
Copyright ©
2025 Astronomy Image Explorer. All Rights Reserved.