Image Details
Caption: Figure 2.
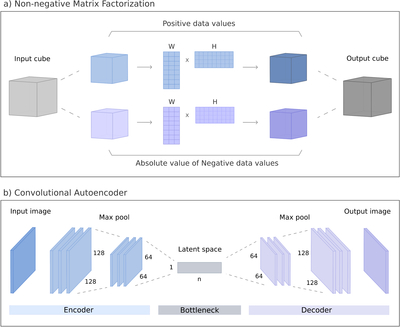
Block diagrams of the (a) nonnegative matrix factorization (NMF) method, and the (b) symmetric convolutional autoencoder constructed for this work. (a) The input image cube is separated into a positive cube and a negative cube, where the absolute values within the negative cube are used to perform NMF. The resulting cubes (where the absolute values are returned to their negative values) are recombined to give the final reconstructed image cube. (b) The autoencoder architecture uses eight 15 × 15 pixel kernels to produce the convoluted images from a latent space of size 1 × n, where n is the number of components. Max pooling is performed prior to each downsampling step, where the image dimensions in pixels in depicted above.
Other Images in This Article








Show More
Copyright and Terms & Conditions
© 2026. The Author(s). Published by the American Astronomical Society.