Image Details
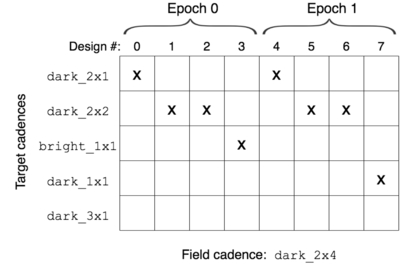
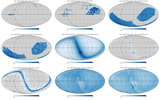
Caption: Figure 5.
Example of how targets with various cadences could be observed by a single robot in a field with a specific cadence. The nomenclature of the cadences is “number of epochs by number of designs per epoch.” The top four rows show cadences which can “fit” into the field epoch shown, i.e., that they have an equal or smaller number of epochs and an equal or smaller number of designs per epoch (assuming that the detailed timing of the epochs fits per Figure 4). Since in this case the field is a dark time field, a target with a bright time cadence has its sky brightness requirements fulfilled, whereas in a bright time field cadence, a target with a dark time cadence would not have its sky bright requirement fulfilled. The bottom row shows a target cadence that cannot be fulfilled in this field.
Other Images in This Article




Show More
Copyright and Terms & Conditions
© 2025. The Author(s). Published by the American Astronomical Society.